Una introduzione ai
Microcontroller PIC
|
Architettura Harvard - RISC
I PIC sono definibili come processori RISC ad architettura
Harvard.
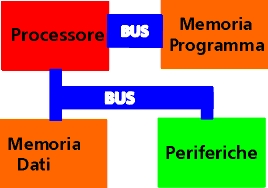 |
L'architettura è di tipo Harvard dispone di bus separati per dati e
periferiche e un' altro per le istruzioni.
Quindi, la gestione della memoria dati e delle istruzioni avviene su
circuiti separati. L' unità centrale può effettuare un accesso ai due
bus contemporaneamente e, sfruttando sistemi di pipeline, si può
eseguire una istruzione per ogni ciclo macchina.
I due bus possono avere ampiezze diverse: ad esempio, nei PIC con bus
dati a 8 bit, il bus istruzioni può essere ampio 12, 14 o 16 bit.
Questa struttura si presenta come la più adeguata a macchine RISC. |

Da osservare che non c'è niente di strano, quindi, nel fatto
che in uno stesso processore si abbia, ad esempio:
- il bus dati da 8 bit
- la larghezza del bus istruzioni di 14 bit
E di conseguenza:
- le locazioni di memoria programma siano ampie ciascuna 14 bit
- quelle della memoria RAM e degli SFR siano da 8 bit
pur facendo sempre riferimento, anche se impropriamente, a "bytes"
e "words".
Ed è altrettanto normale che questi pacchetti di bit siano trattati
dal processore in una unica azione, indipendentemente dalla loro
ampiezza, dato che istruzioni e dati si muovono su bus separati,
trattati da diverse parti dell' ALU.
|
Un sistema RISC è tale quando implementa un numero limitato di
codici di istruzione (opcodes), basilari ed eseguibili in un solo ciclo di cloc.
Per ottenere funzioni più complesse si assembleranno queste istruzioni
elementari in opportuni algoritmi.
E' importante notare che la struttura
di una istruzione di questo genere contiene, oltre al significato dell' istruzione stessa,
anche l'indirizzo di memorizzazione o di salto o il dato su cui operare.
In queste condizioni,
onde non far crescere l'ampiezza del bus istruzioni (costo e complessità), la
memoria viene segmentata in pagine e banchi.
Per cambiare segmento o banco
in uso occorre agire su appositi registri, fatto che complica la programmazione
dei PIC nell' uso di linguaggio Assembly.
Questo problema è meno sentito nel caso di impiego di linguaggi di alto livello,
che possono integrare meccanismi automatici di gestione delle pagine e dei
banchi, oppure di Macro Assembler che permettono di implementare meccanismi
analoghi.
Questo problema pagine/banchi è presente nei PIC delle famigli
Base-line e Mid-range, mentre è attenuato o meno rilevante in quelle successive.
E questa è una ragione per può essere consigliabile iniziare la sperimentazione
in Assembly sui
PIC partendo dai PIC18F e non dai PIC16F.
Consideriamo adesso la struttura interna delle periferiche di un PIC tipo.
|
