Trasmissione dei dati
Su una linea seriale, i bit sono emessi come variazioni di tensione tra i due livelli logici 0 e
1, uno dopo l' altro.
Abbiamo detto che un a trasmissione asincrona non dispone di una
linea separata per il clock, come invece esiste in
SPI o I2C.
Come può, allora, il ricevitore riconoscere il bit trasmesso?
La chiave di comprensione della trasmissione asincrona è questa:
ogni impulso ha una durata ben precisa
che dipende
dal clock del trasmettitore e il tempo t di durata è pari a un periodo del clock
utilizzato.
Dunque, possiamo dire che, nella trasmissione asincrona (ASYNC) non esiste un clock separato
di riferimento, ma sono gli impulsi del segnale stesso ad avere attribuita una
durata ben determinata.
Questo rende il sistema molto
semplice ed economico, ma richiede, come vedremo subito sotto, che trasmettitore e ricevitore operino alla
stessa frequenza, la cui precisione
deve essere tale da impedire fenomeni di de sincronizzazione (frame error,
overrun error). Se trasmettitore e ricevitore utilizzano lo steso
identico valore di clock e il ricevitore ha un modo di sincronizzarsi con il
segnale del trasmettitore, ecco che il problema del clock separato è superato
e la comunicazione richiede almeno un conduttore in meno.
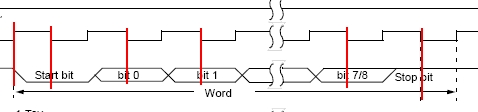
Per risolvere il problema della sincronizzazione, il tipico pacchetto dati
della RS-232 è composto da:
- un bit di start
- un byte dati
- un bit di stop
Questo vuol dire che, per ogni byte di dati trasmesso saranno
effettivamente emessi di 10 bit.
Così, la trasmissione del byte 01000001bin (41hex,
carattere ASCII 'A') corrisponderà al seguente grafico:
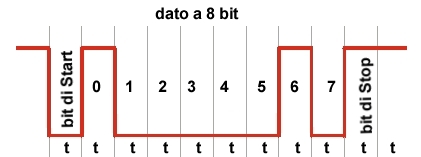
- La linea si trova normalmente nello stato di attesa o idle a livello alto
(1 logico).
-
La prima transizione da alto a basso indica l’inizio e prende il nome di
bit
di Start ed ha la durata di un tempo t. Questo bit iniziale ha lo
scopo di effettuare la sincronizzazione tra il clock del trasmettitore e
quello del ricevitore; questo si avvia in
corrispondenza del riconoscimento della prima transizione sulla linea dati.
- A questo fa subito seguito il
pacchetto dei dati, emessi a partire dal bit meno significativo (LSB), tutti
della stessa durata t, fino al bit più significativo (MSB). Da notare, quindi,
che il diagramma relativo ai dati va letto "al contrario", da destra
a sinistra, per ricostruire il valore del byte.
Questo non è per nulla problematico per i dispostivi di trasmissione e
ricezione, che fanno uso di registri di spostamento (shift register) e quindi
automatizzano il passaggio del dato da parallelo a seriale e viceversa.
- Il pacchetto è chiuso da un bit di Stop, la cui durata è analoga a quella
degli altri impulsi, ma che può essere prolungato, se necessario. Lo scopo di
questo bit è quello di completare la sincronizzazione tra trasmettitore e
ricevitore e finalizzare la chiusura del pacchetto trasmesso, a cui può
seguirne immediatamente un' altro, con la medesima
struttura.
Per quanto riguarda il tempo, ad esempio, con un clock di 4800 Hz, t sarà di
208,33 us e quindi la trasmissione sarà 208,33 x 10 = 2083,3 us. Se lo Stop, che può avere una lunghezza maggiore multipla
di t, ha la durata, ad esempio, di due bit, la trasmissione del pacchetto
richiederà 2291,63 us.
Questo se si considera la lunghezza del dato pari a 8 bit, che è un codice ASCII esteso.
Se si trasferisce un codice standard ASCII (da 0 a 127), 7 bit di dati sono
sufficienti, con un risparmio di tempo. Sono comunque possibili trasmissioni di dati con lunghezza diversa.
Così, anche se comunemente i messaggi comprendono caratteri ASCII o byte
esadecimali a 8 bit, molti moduli o componenti previsti per gestire la
comunicazione seriale (UART/USART) supportano anche comunicazioni con un diverso
numero di bit, nel range da 5 a 9.
Ad esempio, li codice baudot, tipico delle vecchie teletype,
utilizza 5 bit per rappresentare un carattere, mentre
è possibile realizzare sistemi "multi-drop", ovvero un
"bus" su cui sono connessi più dispositivi e in cui si impiega una
codifica a 9 bit per indicare se il dato trasmesso è l' indirizzo di una delle unità
collegate.
Ovviamente non esistono limiti per l' uso di altri codici, come il codice
Murray o EBCDIC o anche dati binari qualsiasi.

Va osservato che allo standard, che è relativo alla struttura della
trasmissione,
possono essere sovrapposti protocolli diversi, ad esempio includendo
nei messaggi dei pacchetti di checksum o altre tecniche di
sicurezza o organizzando i pacchetti di dati in modo particolare a
seconda delle esigenze della comunicazione.
|
In ogni caso, la lunghezza del pacchetto trasmesso è data da:
| numero bit dati + bit di Start + bit di Stop +
eventuale bit di parità |
dove il bit di parità è opzionale e lo Stop può avere una durata di 1t,
1/2t o 2t.
Quindi, un dato a 7 bit, senza parità, comporterà la trasmissione di
9 bit (7 dati + start + stop).
Se il dato è a 8 bit, con parità e con stop prolungato comporterà l'
emissione di 12 bit (8 dati + start + 2 bit di stop + bit di parità).
Ricezione dei dati
Una linea RS-232 è prevista a livello '1' in condizioni di riposo.
Questo fa
si che il bit di Start che avvia la comunicazione sia un impulso a livello '0'
della durata t.
Il
ricevitore rileva il fronte di discesa del segnale e, a partire da
questo, si predispone per la ricezione, avviando il proprio sistema di clock e i
contatori interni.
Sostanzialmente, a partire dal fronte di discesa del bit di Start, viene
attivata una attesa pari a 1/2 t, dopo di che il
ricevitore campiona lo stato della linea ad una cadenza
di tempo pari a t, il che fa cadere il campionamento al centro di ogni
impulso (dato che i due clock sono uguali).
Vari
dispositivi effettuano più di un campionamento per bit in modo da
neutralizzare eventuali disturbi sulla linea.
Inoltre, molto importante, il campionamento è effettuato per il numero di impulsi previsti dal
formato del pacchetto trasmesso e si
conclude con lo Stop, dove la linea ritorna a livello alto per almeno un tempo
t (1 Stop bit) o più. E' quindi evidente che trasmettitore e
ricevitore debbano essere impostati sia per la stessa frequenza che per lo stesso
formato del pacchetto.
In caso contrario il ricevitore effettuerà
campionamenti in punti errati, o per un numero diverso di passi, rendendo impossibile il riconoscimento del
dato.
A questo riguardo solitamente i dispositivi di ricezione sono in grado di
elaborare le situazioni di errore con alcuni segnali di errore:
- overrun error: la velocità di trasmissione ha un clock maggiore
da quello del ricevitore
- framing error: non viene rilevato correttamente il rapporto tra
il bit di Start e quello di Stop, ad esempio per una impostazione errata
della lunghezza del pacchetto o della frequenza dei clock
- parity error: se è impostata una parità, questa non risulta
rispettata
Sta al software di gestione del dispositivo attuare le misure necessarie in
questi casi.
E' evidente che il sistema asincrono, se ha il vantaggio di escludere la
necessità di una linea di clock separato, richiede che la frequenza di
trasmissione e quella del campionamento in ricezione siano per quanto
possibile identiche.
Il massimo errore ammissibile è quindi, teoricamente,
molto minore della durata di mezzo bit e va tenuto conto della possibile
deformazione dei fronti d'onda delle commutazioni dovuti alle
capacità/induttanze parassite del cavo di connessione e, per le trasmissioni
remote, dai problemi e disturbi di linea.
Pertanto il consiglio è di
utilizzare clock con una adeguata precisione e stabilità nel tempo e con le
variazioni della temperatura (1-2% o migliore), cosa che si ottiene
con oscillatori a quarzo.
Inoltre va tenuto presente che, quanto è maggiore
la frequenza di trasmissione, tanto minore sarà la durata degli impulsi e
quindi sarà critica la loro temporizzazione.

Da quanto detto, si evidenzia che:
- è impossibilità
di sospendere la trasmissione di un pacchetto di dati in una
trasmissione asincrona prima della
suo termine.
- Ed è pure impossibile prolungare un bit oltre il tempo t.
In queste circostanze il contenuto del pacchetto andrebbe perduto in quanto il
ricevitore continuerà a campionare il segnale in arrivo per il numero degli
impulsi previsti ed alla cadenza t, originando la ricezione di un dato errato.
Quindi, quanto permesso in trasmissioni sincrone (I2C, SPI), cioè uno
stretch del clock o al limite, anche la sospensione indeterminata della
trasmissione, non sono assolutamente possibili in RS232.
Ne deriva che l' uso di UART/USART (che si occupa autonomamente di
gestire i tempi) è la via più pratica per
implementare la comunicazione, mentre in un bit-banging (emulazione
software) si dovrà avere cura di rispettare con assoluta precisione i
tempi degli impulsi e impedire l' interruzione della trasmissione da
parte di altri processi.
|
|
